
FIGURE 1. Chilled water system head curves.
Designers need to have a way to compute part-load energy consumption scenarios. However, the data aren’t always available. Here, we look at why some good math is worth the effort.
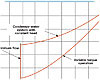
FIGURE 2. Condenser water system head curves.
WSE = Pump bhp · 0.746 · 100 % (1)
Input kW

FIGURE 3. Wire-to-shaft efficiency curve.
WWE = WSE % where Pn is the pump efficiency as a decimal (2)Or:
Pn
WWE = Q (gpm) · H (ft.) (3)
53.08 · Input kW
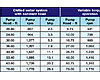
TABLE 1. Comparison of brake hp and pump speeds.
H = net pumping head in ft. measured by the differential pressure transmitter connected across the pumping system headers. The suction and discharge headers must be the same pipe size.
kW = power input to the VSDs for the pumping system as measured by a Watt transmitter.
Wire-to-water efficiency has been used for programming pumps, but it has been replaced by pump input kW that does not require the differential pressure transmitter for measuring pump head.

Figure 4.
M1=S12where M is the torque and S is the pump speed (4)
M2S22
This assumes that the pump performs in accordance with the affinity laws for centrifugal pumps that state that the head on a pump varies as the square of the pump speed. Such is not the case for most variable-speed chilled water or condenser pumps where a constant head exists in the water system. For chilled water systems, a differential pressure is maintained on the system to provide pump head for a terminal unit and its piping and control valve, Figure 3. The constant head in a condenser water system is the lift over the cooling tower plus the friction loss in the chiller condenser, Figure 4. Why is this important?

Figure 5.
Figure 4 describes a condenser water system utilizing variable speed pumps on an installation with five 600-ton chillers. In most cases, there is little energy savings in making condenser pumps variable speed. The pump energy saved is often less than the added energy consumed by the chiller with variable flow in its condenser. The only variable head is the system friction; in this instance, this is 35 ft. Only when there are a number of chillers and a sizeable amount of system piping friction due to remote cooling towers can variable speed be justified.
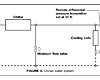
Figure 6.

Figure 7.

TABLE 2. Comparison of brake hp and pump speeds.
This data is from the author’s experience with variable-speed pumps and VFDs. It should be replaced by a curve based upon the actual brake horsepowers and speeds of the pump under evaluation. One reason for publishing this article is to encourage people in the VSD industry to develop data for such hybrid pump operation so that HVAC engineers can compute energy estimates for variable-speed pumps with reasonable accuracy. The brake hp and pump speed data in Tables 1 and 2 for the chilled water system and for the condenser water system should be adequate for the computation of these wire-to-shaft efficiency curves.

TABLE 3. Wire-to-shaft efficiencies.
